什么是 DBSCAN?
DBScan 是一种基于密度的空间聚类算法,它可以将高密度区域中的点组成一个簇,并能在有噪声的数据集中识别出任意形状的聚类。
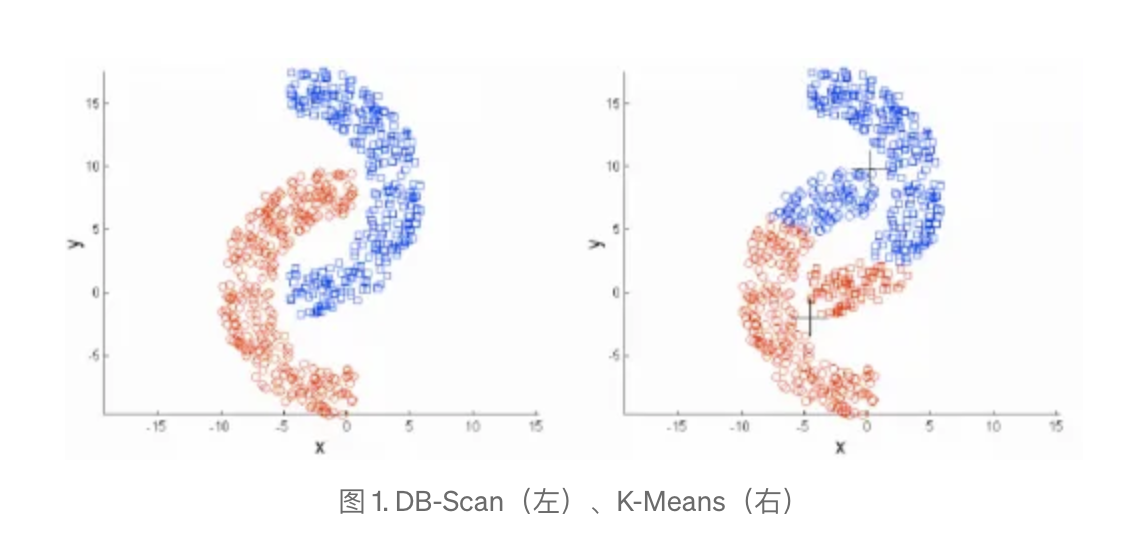
DBScan 算法试图将数据空间中紧密相连的点组成一个簇。它不仅能够识别出基于密度的簇,而且能够识别并排除数据中的噪声点。这种基于密度的聚类方法与基于距离的聚类方法(如 K-Means)不同,后者需要事先知道要形成的簇的数量,而且通常只能识别出凸形状的簇。

DBScan 的优势在于不需要事先指定簇的数量,它可以根据数据本身的结构来确定簇的形成。此外,DBScan 对于数据中的异常值不敏感,因为它不会将噪声点纳入任何簇中。
算法的核心概念
以下是该算法的核心概念。
-
密度:该算法基于一个点的 "邻域" 内的点数(即密度)来进行聚类。
-
ε-邻域:对于任意一个点 p,其 ε-邻域包含了距离 p 小于等于 ε 的所有点。
-
核心点:如果一个点的 ε-邻域内至少有 minPts(最小点数参数)数量的点,则该点为核心点。这意味着核心点是在密集区域内的点。
-
边界点:如果一个点不是核心点,但它的 ε-邻域内包含至少一个核心点,那么它是边界点。
-
噪声点:如果一个点不是核心点也不是边界点,则它被视为噪声点。
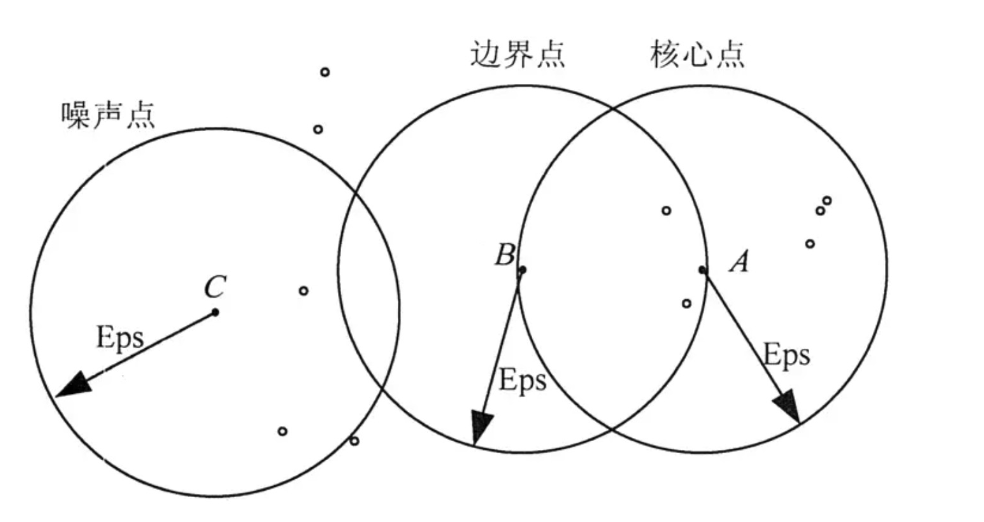
以下图为例,假定最小点数 MmPts=5,则:
- 点 A 为核心点,其 ε-邻域内超过了5个点;
- 点 B 为边界点,其 ε-邻域内小于5个点,且落在了点 A 的 ε-邻域内;
- 点 C 为噪声点,其 ε-邻域内小于5个点,且没有落在任何核心点的邻域内。
-
直接密度可达:如果点 q 在点 p 的 ε-邻域内,并且 p 是一个核心点,我们说 q 是从 p 直接密度可达的。
-
密度可达:如果存在一个点的序列 p1, p2, ..., pn,其中 p1 是核心点,pi+1 是从 pi 直接密度可达的,那么 pn 是从 p1 密度可达的。
-
密度相连:如果存在一个点 o 使得点 p 和 q 都是从 o 密度可达的,那么 p 和 q 密度相连。
算法流程
DBScan 算法的一般步骤如下。
- 算法开始时,所有点都标记为未访问。
- 对每个未访问的点,以此为中心,计算其 ε-邻域内的所有点。
- 如果该点的 ε-邻域内至少有 minPts 数量的点,则创建一个新簇,否则标记该点为噪声(可能在后面步骤中被标记为边界点)。
- 如果一个点是核心点,则对其 ε-邻域内的所有未访问点递归地执行相同过程,这会导致簇的扩展。
- 这一过程持续进行,直到所有的点都被访问。
案例分享
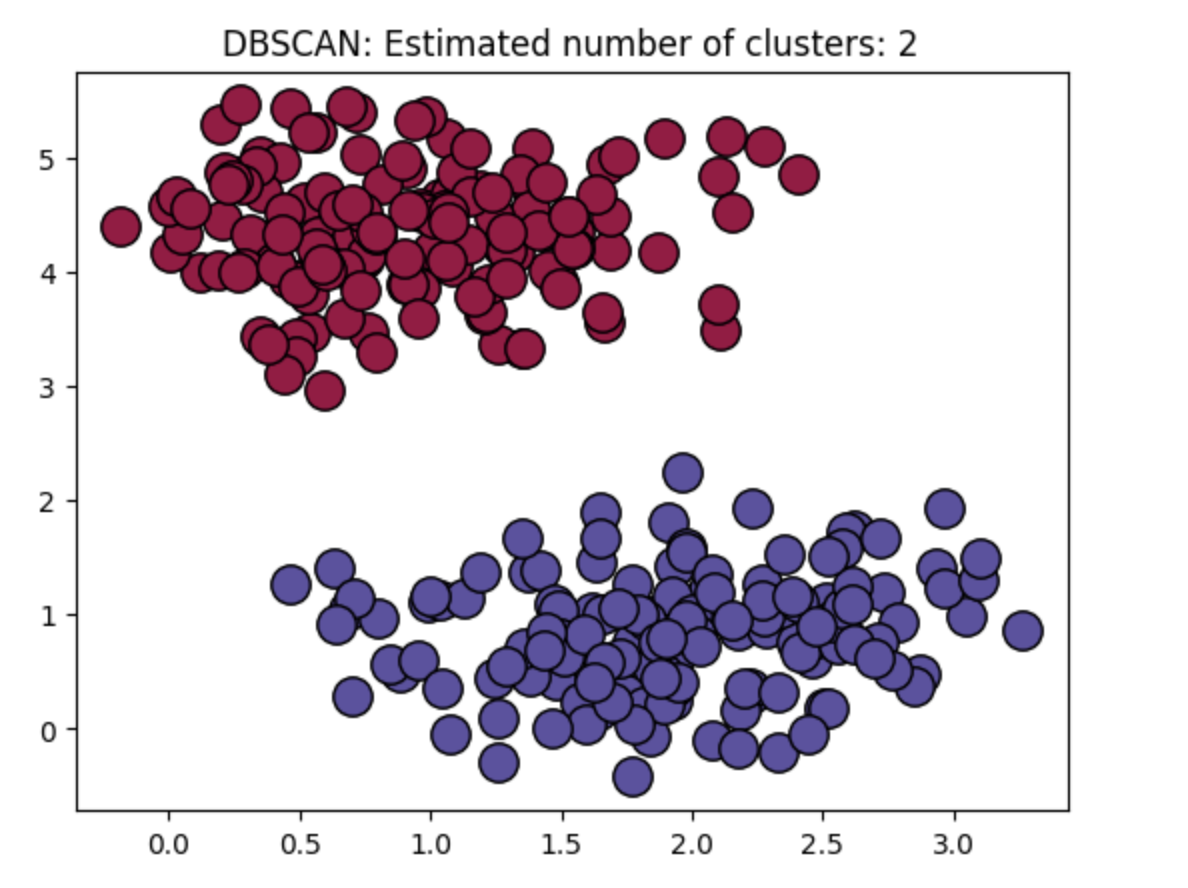
以下是用 Python 实现 DBScan 算法的一个简单例子。
from sklearn.cluster import DBSCAN
from sklearn.datasets import make_blobs
import matplotlib.pyplot as plt
import numpy as np
# 生成样本数据
X, _ = make_blobs(n_samples=300, centers=2, cluster_std=0.60, random_state=0)
# 应用DBSCAN算法
db = DBSCAN(eps=0.5, min_samples=5).fit(X)
labels = db.labels_
# 识别核心样本
core_samples_mask = np.zeros_like(db.labels_, dtype=bool)
core_samples_mask[db.core_sample_indices_] = True
# 去除噪声数据
X_core = X[core_samples_mask]
labels_core = labels[core_samples_mask]
# 绘制结果
unique_labels = set(labels_core)
colors = [plt.cm.Spectral(each) for each in np.linspace(0, 1, len(unique_labels))]
for k, col in zip(unique_labels, colors):
if k == -1:
# 黑色用于噪声
col = [0, 0, 0, 1]
class_member_mask = (labels_core == k)
xy = X_core[class_member_mask]
plt.plot(xy[:, 0], xy[:, 1], 'o', markerfacecolor=tuple(col),
markeredgecolor='k', markersize=14)
plt.title('DBSCAN: Estimated number of clusters: %d' % len(unique_labels))
plt.show()
DBSCAN 如何确定最优的领域半径 ε ?
确定 DBSCAN 算法中最优的领域半径 ε(epsilon)是非常重要的,因为它直接影响着聚类的结果。选择合适的 ε 值需要考虑数据集的特点和密度。
以下是一些常用的方法来确定最优的 ε 值:
K 距离图
K 距离图是确定 ε 值的一种常用方法。这个方法的步骤如下:
- 选择一个小的 k 值
通常,k 取决于数据集的大小和密度。一个常用的启动点是 k = sqrt(n),其中 n 是数据集中的点的数量。
- 计算所有点的 k-距离
对于数据集中的每个点,计算它到第 k 近邻的距离。
- 绘制 k-距离图
对所有点的第 k 近邻的距离进行排序并绘制成图。横轴是点的索引,纵轴是到第 k 近邻的距离。
- 分析图形
K-距离图中的拐点(即图中曲线的急剧上升点)通常被认为是合适的 ε 值。这个拐点表示距离开始显著增加的点。
基于领域内容的方法
另一种方法是通过观察数据点的领域(即在某个 ε 距离内的邻近点)来选择 ε:
- 选择一个初始 ε 值:从一个较小的 ε 值开始。
- 观察领域内的点数:对每个点,计算在该 ε 距离内的邻近点数量。
- 调整 ε 值:如果大多数点的邻近点数量太少或太多,这可能表明 ε 值设定得太小或太大。根据观察结果调整 ε 值,重复此过程。
DBSCAN 如何确定最优的 MinPtS 值?
通常,我们应该将minPts设置为大于或等于数据集的维数。也就是说,我们经常看到人们用特征的维度数乘以2来确定它们的minPts值。
就像用来确定最佳的epsilon值的“肘部方法”一样,minPts的这种确定方法并不是100%正确的。
DBSCAN 算法是如何解决噪声和离群点的?
DBSCAN 的核心思想是基于密度的聚类。算法将密集区域(即邻近点数量超过某个阈值的区域)的点聚集成一个簇。这种方法自然地将数据集中的高密度区域(簇)与低密度区域(噪声或离群点)区分开。
DBSCAN 聚类的优缺点?
优点
- 不需要预先指定簇的数量,与 K-means 不同,DBSCAN 不需要在聚类前指定簇的数量,这对于对数据集不了解的情况非常有用。
- 可以发现任意形状的簇,DBSCAN 不仅可以识别凸形状的簇,还可以发现非常复杂和任意形状的簇。
- 对噪声和异常值有较好的鲁棒性,DBSCAN 能有效地识别并处理噪声数据。
- 不依赖于距离度量的选择,虽然 DBSCAN 通常使用欧几里得距离,但它可以与任何距离度量一起使用,这使得它在多种类型的数据集上都很有效。
缺点
- 参数选择难度,虽然参数较少,但正确选择 ε(邻域半径)和 MinPts(最小点数)对于算法的成功至关重要,而且有时很难决定合适的值。
- 可变的密度问题,如果数据集中的簇具有显著不同的密度,DBSCAN 可能无法很好地识别所有簇。
- 大规模数据集的处理效率,在处理大规模数据集时,DBSCAN 的计算复杂度可能会变得较高。
- 边界点的归属问题,在 DBSCAN 中,位于不同簇边界的点可能被分配给任一簇,这可能会导致簇的形状在不同